
SHARE
Unmanned Aerial Systems That Allows Autonomous Drone Navigation
Engineering is in constant development, and a lot of research is needed to maintain this fast evolution in technology. Said research is made by companies and universities, and oftentimes by both of them working together.
Some days ago, the ennomotive team visited one of the most important engineering universities in Spain, the Universidad Politecnica de Madrid (UPM), where they were celebrating their Research Meeting. In that meeting, they presented 112 research projects and 24 different projects that have become patents.
 Research Meeting at Universidad Politécnica de Madrid
Research Meeting at Universidad Politécnica de Madrid
As you can imagine, these projects have covered a wide scope of areas such as statistics, acoustics and industrial organization, nuclear, laser, and seismic technology, materials, energy, or bio-engineering. They spoke to different researchers and found many interesting projects with a promising future. Therefore, today we want to show you one of the projects that we liked most.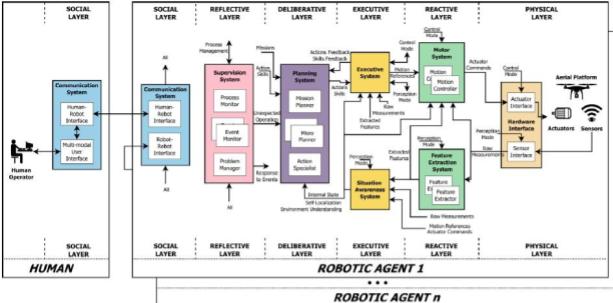 A general architecture for autonomous navigation of unmanned aerial systems
A general architecture for autonomous navigation of unmanned aerial systems
One of the most interesting things is that the system is implemented by means of an open-source software framework. Aerostack is a multipurpose software framework for aerial robotic systems developed by Vision4UAV. This, together with the fact that it uses ROS, allows the different developers to access this open-source, modular, and multi-process software, together with the library of components. In order to prove that the system worked properly, some testing was carried out. One test, which was a complete success, consisted of an indoor search and rescue mission performed by two autonomous drones at the same time. Join our engineering community here
 Research Meeting at Universidad Politécnica de Madrid
Research Meeting at Universidad Politécnica de MadridAs you can imagine, these projects have covered a wide scope of areas such as statistics, acoustics and industrial organization, nuclear, laser, and seismic technology, materials, energy, or bio-engineering. They spoke to different researchers and found many interesting projects with a promising future. Therefore, today we want to show you one of the projects that we liked most.
A general architecture for autonomous navigation of unmanned aerial systems
Presented by Jose Luis Sanchez-Lopez, the project consisted of an architecture for aerial robots which simplifies the use of micro aerial robots. The goal is to expand their use to a great number of applications and achieve fully autonomous navigation for a group of drones performing complex missions. The project includes not only the system architecture but also the required components, their functionalities, and their relationship. A general architecture for autonomous navigation of unmanned aerial systems
A general architecture for autonomous navigation of unmanned aerial systemsOne of the most interesting things is that the system is implemented by means of an open-source software framework. Aerostack is a multipurpose software framework for aerial robotic systems developed by Vision4UAV. This, together with the fact that it uses ROS, allows the different developers to access this open-source, modular, and multi-process software, together with the library of components. In order to prove that the system worked properly, some testing was carried out. One test, which was a complete success, consisted of an indoor search and rescue mission performed by two autonomous drones at the same time. Join our engineering community here