SHARE
7 tipos de garras de robot y sus usos en la industria
Garras de robot y sus usos en la industria
En este artículo de garras de robot (también llamadas end-effectors) vamos a mostrar una recopilación de los distintos tipos y sus usos prácticos en la industria, así como algunos aspectos que normalmente pueden pasar desapercibidos.
La pregunta que se hace cualquier ingeniero que debe automatizar algún proceso, una vez elegido el robot, es ¿y ahora cómo lo agarro? Si el producto no es muy delicado las opciones son amplias, pero si debemos tener cuidado la cosa se empieza a complicar. Por otra parte, hacer garras a medida es muy caro, no hay garantías de que funcione y debemos emplear recursos en su programación específica y adaptación.
Afortunadamente, el mundo de la robótica ha cambiado mucho y cada vez hay más kits disponibles, de modo que podemos encontrar el producto que necesitamos para nuestro proceso industrial e instalarlo nosotros mismos con mucha facilidad.
Universal Robots fue pionero en abrir su sistema a otros fabricantes, de forma abierta, y esta estrategia ha dado sus frutos con multitud de productos y kits que podemos utilizar en sus cobots para la mayoría de aplicaciones de la industria.
También han aumentado los diseños disponibles para la fabricación por vosotros mismos, gracias a la pujanza y reducción de costes de las impresoras 3D, lo que aumenta las posibilidades de adaptación a extremos casi ilimitados.
Aquí encontraréis los distintos tipos de garras de robot que más importancia tienen ahora mismo en el mercado, y algunos más novedosos cuya aplicación aún no es masiva.
Si quieres estar al tanto de nuestros retos de robótica y automatización, consulta nuestra sección de desafíos recientes.
Tipos de garras de robot
1. Garras de 2 dedos
Estas son las garras de robot más sencillas, adecuadas para muchos productos industriales y fáciles de fabricar. Dentro de este grupo existen diferentes alternativas: con control de apertura, con control de presión, con control de distancia en el cierre y en la apertura, pudiendo coger piezas también metiendo los 2 dedos dentro de un orificio. A su vez, pueden tener actuación neumática o eléctrica. Los modelos que más nos han gustado son el de On-Robot y el de Robotiq, con su capacidad Plug & Play en los robots de Universal Robots que los hace muy fáciles de utilizar en fábrica. De hecho en el Ennmotive Hackathon de la Industria 4.0 hubo quien los utilizó y programó sin haberlo hecho nunca.

El de On-Robot tiene la particularidad de venir preparado para poder poner 2 garras sobre una misma muñeca, lo que amplía enormemente las posibilidades de manipulación, ya que además trabajan independientemente.
2. Garras de 3 dedos
Este tipo de garra de robot es mucho menos utilizada, ya que la mayoría de los casos de automatización se pueden resolver con la garra de 2 dedos. Sin embargo, cuando es necesario agarrar objetos delicados con fuerza y precisión, las garras de tres dedos son las adecuadas. Además, cuando tienen dedos articulados se adaptan mejor a superficies no planas. Este tipo de garras de robot resultan imprescindibles cuando hay que agarrar una gran variedad de piezas, pues necesitaremos una garra versátil y capaz de adaptarse a cualquier superficie. Obviamente, su mayor complejidad hace que doble el precio de la garra de dos dedos. Un ejemplo de uso de estas garras puede ser la manipulación de tubos largos, ya que se puede mejorar su alineación y eficacia en los giros rápidos. eTambién existen garras hay de dedos minúsculos y sin articular, mucho más baratos, adecuados para coger pequeños objetos cilíndricos. Algunos ejemplos son:
Mirad la página de Universal Robots para ver una recopilación de estas garras, los enlaces a sus respectivas webs y pedir presupuesto.
3. Garras de dedos flexibles
Las garras de robot de dedos flexibles son más novedosas y adecuadas para coger objetos muy variados. Aunque en general están más limitadas en cuanto al volumen y peso de lo que pueden agarrar. Sin embargo son perfectas para objetos más delicados, como una manzana.
These 'soft robots' handle food with care pic.twitter.com/5aoegVWpBr
— Tech Insider (@techinsider) April 3, 2018
Hay algunas muy sencillas, basadas en una estructura de láminas, como el Festo Multi Choice Gripper que además sirve tanto para garras paralelas como de centrado, o el de Kuka, también muy parecido, y pensado para la utilización con robots colaborativos.

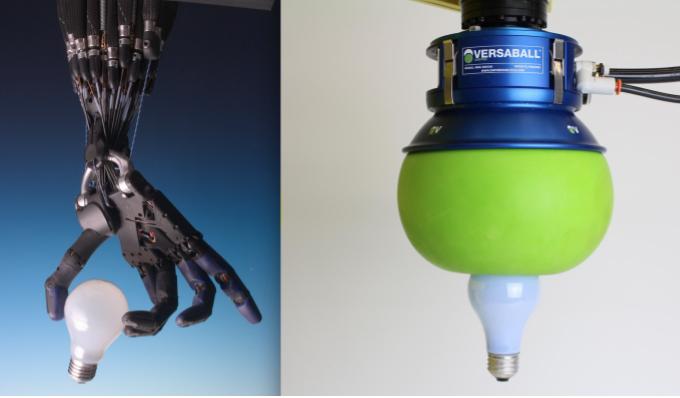
4. Bola flexible rellena de granos
Se trata de un globo de látex relleno de granos que se deja reposar sobre el objeto a agarrar, amoldándose al objeto, para succionar el aire del globo y convertirlo en una forma rígida que abraza el objeto sin dañarlo. Sorprendió y mucho tras su lanzamiento debido a su sencillez, su concepto y su versatilidad. En el vídeo tenemos un ejemplo de iRobot.
Después han ido saliendo variaciones, dependiendo de los objetos a agarrar, podemos cambiar el diámetro del globo, y podemos rellenarlo con distintos tipos de granos: café molido, de arroz, café en grano… Mira la garra de Cornell University en este vídeo.
Hay una variante parecida, de Festo, es de silicona con doble cámara de agua y gas, basado en como la lengua de un camaleón atrapa a sus presas.
5. Garras grandes para paletizado
Aquí los avances son en la estandarización, pudiendo encargar varios tipos predefinidos, además del incremento en capacidad y variedad. Como ejemplo tenemos algunos de ABB, muy fuerte en el manejo de cargas pesadas.

Lo que está por venir
Aunque su uso no es todavía industrial, sí puede serlo en muy poco tiempo debido a la velocidad a la que avanza el desarrollo des estas garras. Resulta especialmente interesante la utilización de impresoras 3D por las ventajas de diseño individualizado y de mantenimiento que presentan.
6. Garras semiprofesionales impresas en 3D
Existen modelos de garras semiprofesionales impresas en 3D en plataformas de diseño como Grabcad, Autodesk Academy y otras, y si disponemos de una impresora 3D podemos fabricarlas nosotros mismos, siempre que la fuerza que debemos aplicar no sea excesiva, además de que los productos no pesen mucho, aunque todavía están en un plano más educativo y semiprofesional. Especialmente interesante una versión de 3 dedos impresa por Materialise en Expo Milano 2105.

7. Garras de robot experimentales
Festo lleva ya años trabajando en garras biónicas, basadas en la naturaleza, a través de Bionic Learning Network, suyo es el Octopus Gripper. Otro modelo distinto es el de la pinza de goma de EPFL con aletas compuestas por cinco capas de material cada una: caucho preestirado entre dos capas de electrodos, esto hace que las aletas se curven hacia afuera cuando están apagadas.

¿Conoces otras garras de robots distintas a las que aparecen en el artículo? ¿Cómo las usan las empresas industriales?
Antes de que te vayas, tenemos una pregunta más para ti:
¿Qué tipo de pinza robótica puede mover tubos pesados dentro de una fábrica? En ennomotive ya hemos resuelto este reto, puedes leer más sobre ello aquí.
